Waypoints Column - Coming Soon
Note: The display of the Waypoints column is dependent on a system configuration setting and will display only if this setting is switched on.
The Waypoints column appears in the Unassigned and In-progress tabs of the Task List screen and in the Task Queue screen. The column displays the waypoints for each task using a range of icons and colours depending on the number of waypoints, the task status and the task handler's progress through the task.
In the Task List Unassigned Tab
The Unassigned tab view displays the waypoints for the task if there are only two and displays the first and last waypoint with a dotted line between if there are more than 2 waypoints. In this instance, the display can be expanded to display all waypoints.
Below are examples of how the waypoints can be displayed.
|
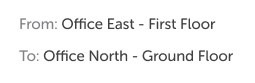
A task with 2 waypoints, both waypoints display as From: and To: |
|
|
A task with more than 2 waypoints, the first and last waypoints display with a dotted line between. Click on the down arrowhead to display all the task's waypoints. |

|
|
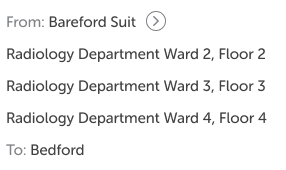
A task with more than 2 waypoints expanded to display all waypoints. Click on the right arrowhead to collapse the display. |
|
In the Task List In-progress Tab
The In-progress tab view displays waypoints as circles, coloured and filled or unfilled, connected with lines, coloured and solid or dotted, to indicate the task handlers's progress through the task.
For tasks with more than two waypoints, the arrowhead enables the display to be expanded to show all waypoints.
Below are examples of how waypoints are displayed depending on the task handler's progress through a task.
|
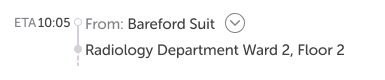
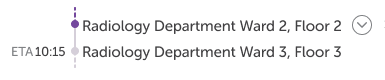
Task handler on the way to the first waypoint, grey unfilled circle, the second waypoint, grey filled circle they have yet to start towards it. A grey solid line connects the two waypoints and grey dotted line indicates that there are more waypoints to follow. The ETA at the first waypoint displays and the down arrowhead can be used to display all waypoints, if required. |
|
|
Task handler has reached and passed the first waypoint, purple filled circle, and is on the way to the second waypoint, grey unfilled circle connected by a purple solid line. |

|
|
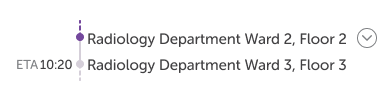
Task handler has reached the second, or subsequent, waypoint, displayed as a purple filled circle. The purple dotted line indicates the task handler has been to previous waypoints. The grey filled circle and grey solid line indicates the task handler has not started towards the next waypoint. |
|
|
Task handler has reached the penultimate waypoint, purple filled circle, and is on their way to the last waypoint, grey unfilled circle connected with a purple solid line. |

|
|
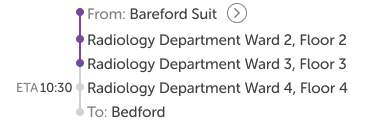
The down arrowhead is used to expand the display to show all waypoints, the purple colouring indicates the current progress of the task handler. In this example, the task handler is at the third waypoint but has not yet started out to the fourth waypoint. |
|
In the Task Queue Screen
The Task Queue screen displays the Waypoints column similar to the Task List screens depending on the status of the tasks.
Below are examples of how the waypoints can be displayed.
| Task's unassigned or assignment in progress. |

|
| Task is assigned with the task handler on their way to the first waypoint. |
|
| Task in-progress or paused. |
|
Missed Waypoints
If a task handler has missed a waypoint or appears to have missed a waypoint owing to a low detection rate in that region, when they are detected arriving at the subsequent waypoint a message displays on their mobile phone asking "Did you visit (previous waypoint)? Yes/No".
If the task handler taps:
-
Yes - An assumed time is set for their arrival at the previous waypoint in the flyout details screen, with the description "(Full name) confirmed they attended (waypoint name)".
-
No - No arrival time is set for the previous waypoint but the task is allowed to progress.
If the task handler does not respond to the prompt, the default option No is set as they exit the current waypoint.
Note: This will only work for one missed waypoint at a time.